")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")

2016年,不简单!在这一年,机器人行业实现了快速的发展。从猴年央视春节晚会上大放异彩的机器人舞蹈到现在遍地开花的各大机器人操作系统、控制系统企业,从全国各地的机器人大会、机器人论坛到机器人与互联网运营、大数据等新兴技术的结合,我们惊奇的发现,机器人早已不是过去那个只会重复体力劳动的“大笨熊”,而是越发的智能化和个性化。
现在,越来越多的机器人进入那些“百姓”企业,企业在欢庆的同时,也盘算着自己心里的“小九九”——机器人的控制系统性能如何呢?
在机器人行业,提到性能规范,一般是针对整机而言。评价工业机器人整机性能的指标有很多,基于不同的的设计目的以及用途,其整机配件搭配、结构设计以及参数调整也有所差异,控制系统只是其中的一个环节,发动机(伺服电机)、变速箱(减速器)、底盘/悬挂(结构件)等对机器人整体的性能都有很大的影响。
一般来说,工业机器人控制系统的性能可以由机器人的位姿精度和轨迹精度来间接表示。
位姿精度(PoseAccuracy)
机器人的位姿精度一般指位姿重复度。
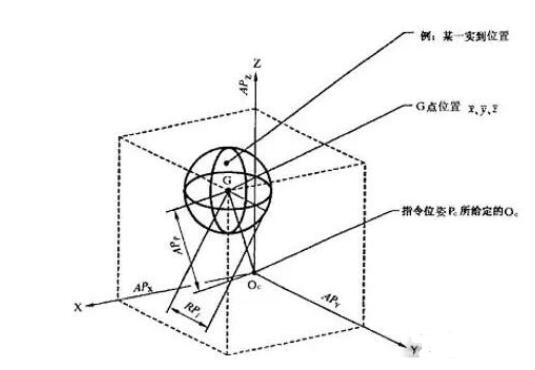
机器人的位姿是指机器人相对于某一参考坐标系的位姿,其重复位姿精度是机器人的一项最重要的技术指标,该指标集中反映机器人的机电性能和使用效果,即机器人对同一指令位姿从同一方向重复响应n次后实到位姿的一致程度。一般采用激光跟踪仪进行位姿精度的测量,如下图所示:
想要达到较高的位姿精度,需要控制系统提供以下功能:
补偿机械连杆的运动学参数误差,如连杆加工误差、装配误差、机械公差等;
补偿关节柔性及连杆柔性;
提供高精度的机械零点标定功能。
轨迹精度(PathAccuracy)
机器人的轨迹精度,一般是指轨迹重复精度,表示机器人对同一轨迹指令重复n次时实到轨迹的一致程度。一般也采用激光跟踪仪进行测试,让机器人重复走某一条轨迹n次,然后取由n条轨迹组成的轨迹条横切面的半径。如下图所示:
